| .. | ||
| 01_simple_route.png | ||
| 01_simple_route.py | ||
| 02_congestion_resolution.png | ||
| 02_congestion_resolution.py | ||
| 03_locked_paths.png | ||
| 03_locked_paths.py | ||
| 04_sbends_and_radii.png | ||
| 04_sbends_and_radii.py | ||
| 05_orientation_stress.png | ||
| 05_orientation_stress.py | ||
| 06_bend_collision_models.png | ||
| 06_bend_collision_models.py | ||
| 07_large_scale_routing.png | ||
| 07_large_scale_routing.py | ||
| 08_custom_bend_geometry.png | ||
| 08_custom_bend_geometry.py | ||
| 09_unroutable_best_effort.png | ||
| 09_unroutable_best_effort.py | ||
| README.md | ||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Inire Routing Examples
This directory contains examples demonstrating the features and architectural capabilities of the inire router.
Architectural Visualization
In all plots generated by inire, we distinguish between the search-time geometry and the final "actual" geometry:
- Dashed Lines & Translucent Fill: The Collision Proxy used during the A* search (e.g.,
clipped_bboxorbbox). This represents the conservative envelope the router used to guarantee clearance. - Solid Lines: The Actual Geometry (high-fidelity arcs). This is the exact shape that will be used for PDK generation and fabrication.
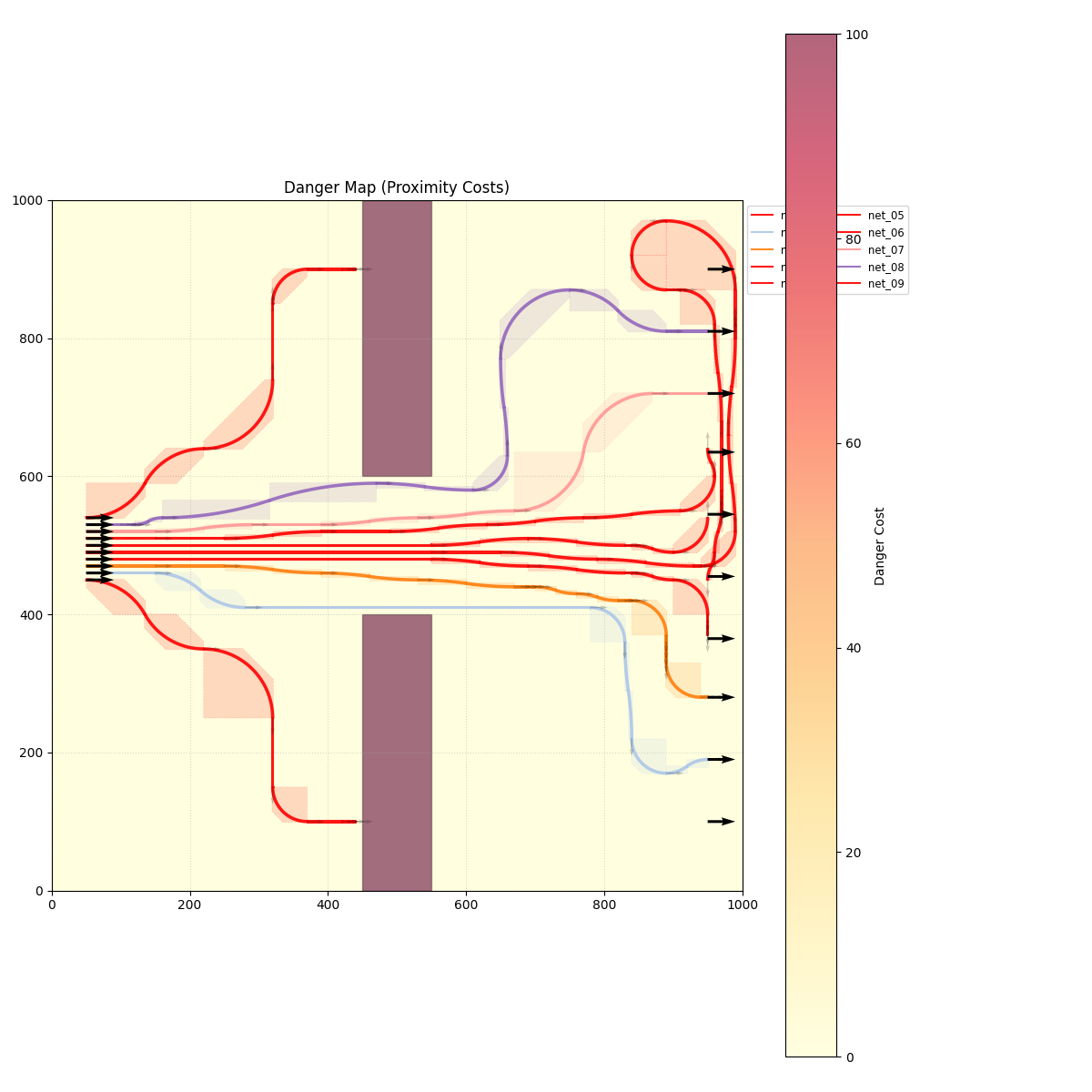
1. Fan-Out (Negotiated Congestion)
Demonstrates the Negotiated Congestion algorithm handling multiple intersecting nets. The router iteratively increases penalties for overlaps until a collision-free solution is found. This example shows a bundle of nets fanning out through a narrow bottleneck.
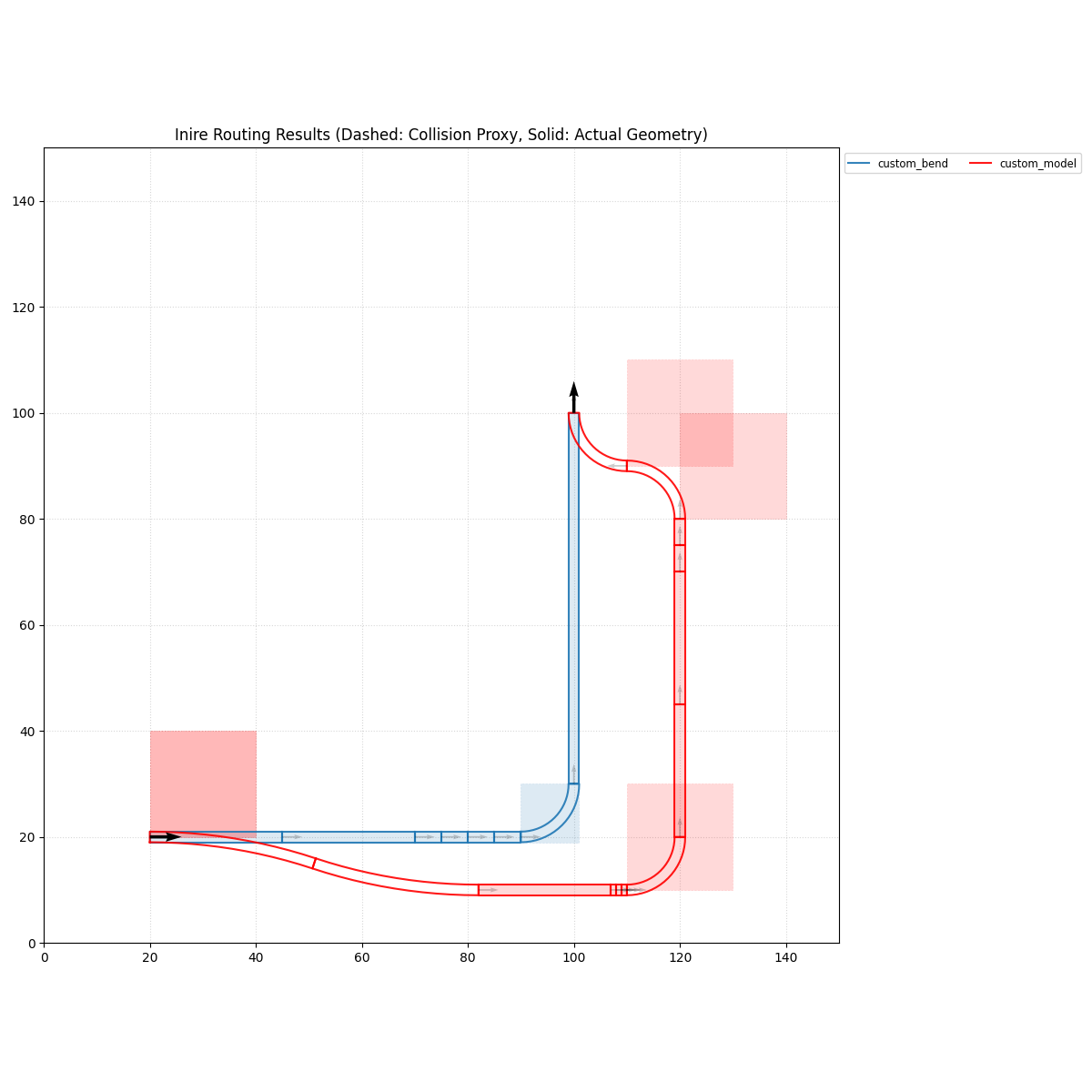
2. Custom Bend Geometry Models
inire supports multiple collision models for bends, allowing a trade-off between search speed and geometric accuracy:
- Arc: High-fidelity geometry (Highest accuracy).
- BBox: Simple axis-aligned bounding box (Fastest search).
- Clipped BBox: A balanced model that clips the corners of the AABB to better fit the arc (Optimal performance).
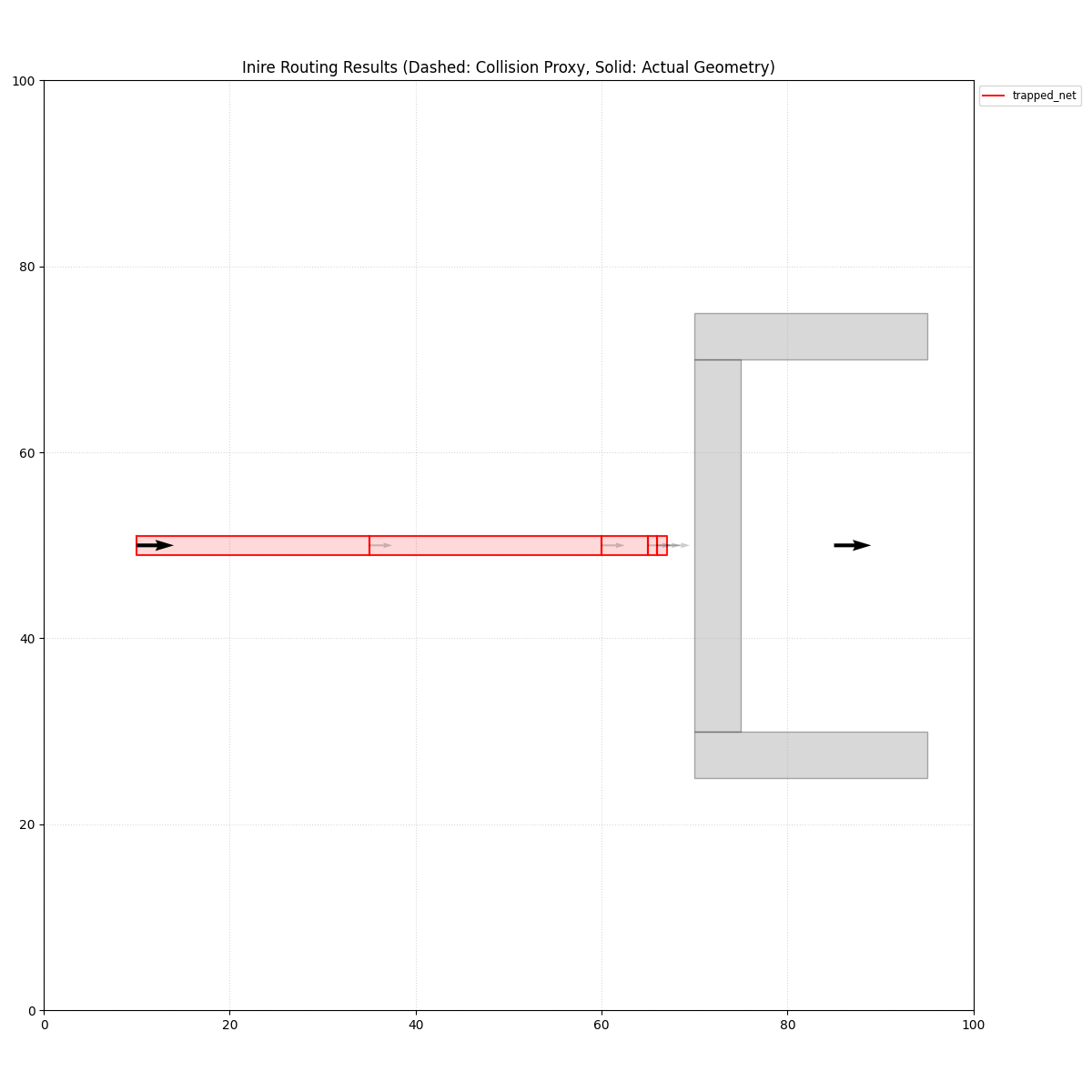
3. Unroutable Nets & Best-Effort Display
When a net is physically blocked or exceeds the node limit, the router returns the "best-effort" partial path—the path that reached the point closest to the target according to the heuristic. This is critical for debugging design constraints.
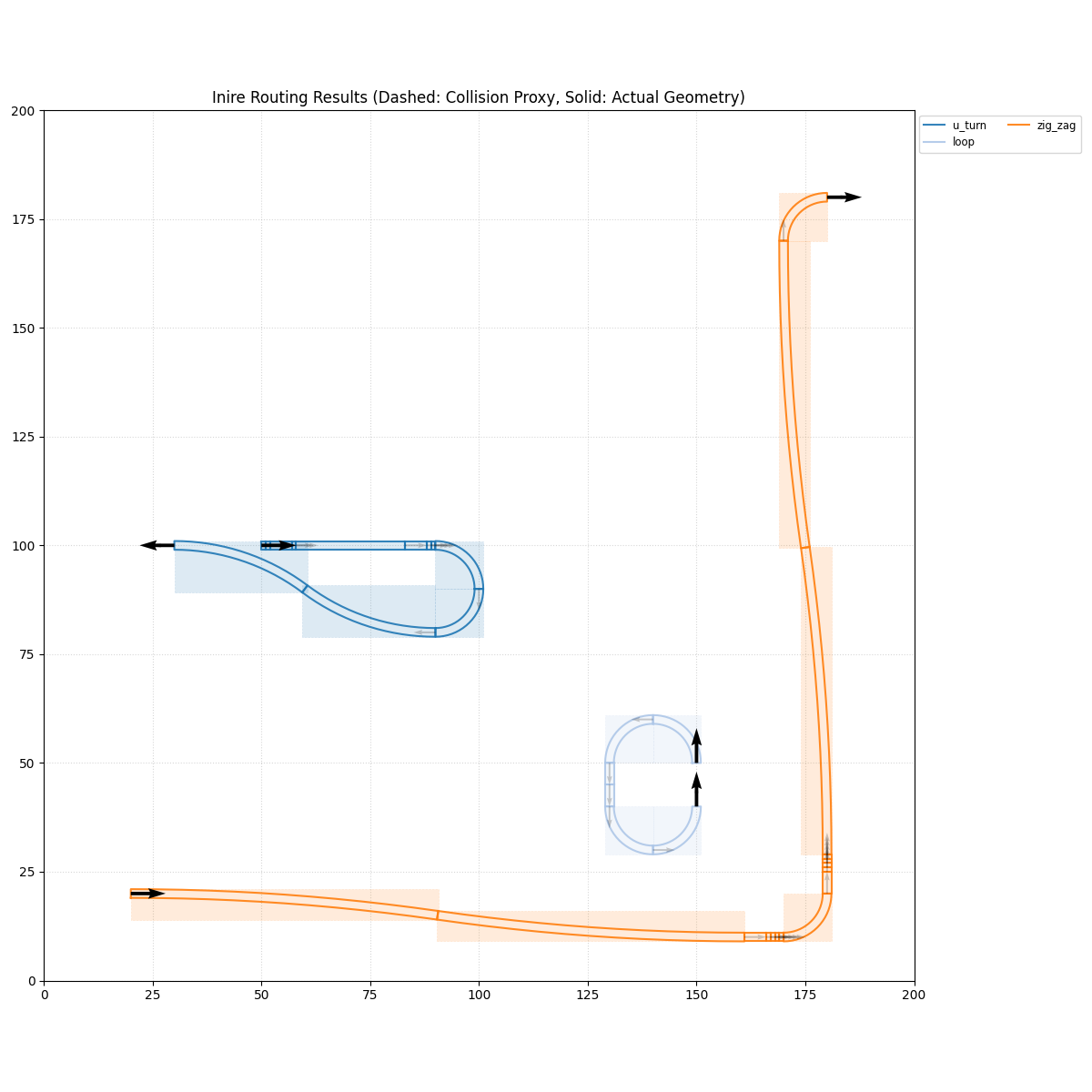
4. Orientation Stress Test
Demonstrates the router's ability to handle complex orientation requirements, including U-turns, 90-degree flips, and loops.
5. Tiered Fidelity & Lazy Dilation
Our architecture leverages two key optimizations for high-performance routing:
- Tiered Fidelity: Initial routing passes use fast
clipped_bboxproxies. If collisions are found, the system automatically escalates to high-fidelityarcgeometry for the affected regions. - Lazy Dilation: Geometric buffering (dilation) is deferred until a collision check is strictly necessary, avoiding thousands of redundant
buffer()andtranslate()calls.