| .. | ||
| 01_simple_route.png | ||
| 01_simple_route.py | ||
| 02_congestion_resolution.png | ||
| 02_congestion_resolution.py | ||
| 03_locked_paths.png | ||
| 03_locked_paths.py | ||
| 04_sbends_and_radii.png | ||
| 04_sbends_and_radii.py | ||
| 05_orientation_stress.png | ||
| 05_orientation_stress.py | ||
| 06_bend_collision_models.png | ||
| 06_bend_collision_models.py | ||
| 07_large_scale_routing.png | ||
| 07_large_scale_routing.py | ||
| 08_custom_bend_geometry.png | ||
| 08_custom_bend_geometry.py | ||
| 09_unroutable_best_effort.png | ||
| 09_unroutable_best_effort.py | ||
| README.md | ||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Inire Routing Examples
This directory contains examples demonstrating the features and architectural capabilities of the inire router.
Architectural Visualization
In all plots generated by inire, we distinguish between the search-time geometry and the final "actual" geometry:
- Dashed Lines & Translucent Fill: The Collision Proxy used during the A* search (e.g.,
clipped_bboxorbbox). This represents the conservative envelope the router used to guarantee clearance. - Solid Lines: The Actual Geometry (high-fidelity arcs). This is the exact shape that will be used for PDK generation and fabrication.
Example Index
| Example | Script | Output PNG | Summary |
|---|---|---|---|
| 01 | 01_simple_route.py |
01_simple_route.png |
Single-net baseline route with one bend radius. |
| 02 | 02_congestion_resolution.py |
02_congestion_resolution.png |
Small multi-net negotiated-congestion example. |
| 03 | 03_locked_paths.py |
03_locked_paths.png |
Incremental routing with previously routed geometry treated as locked obstacles. |
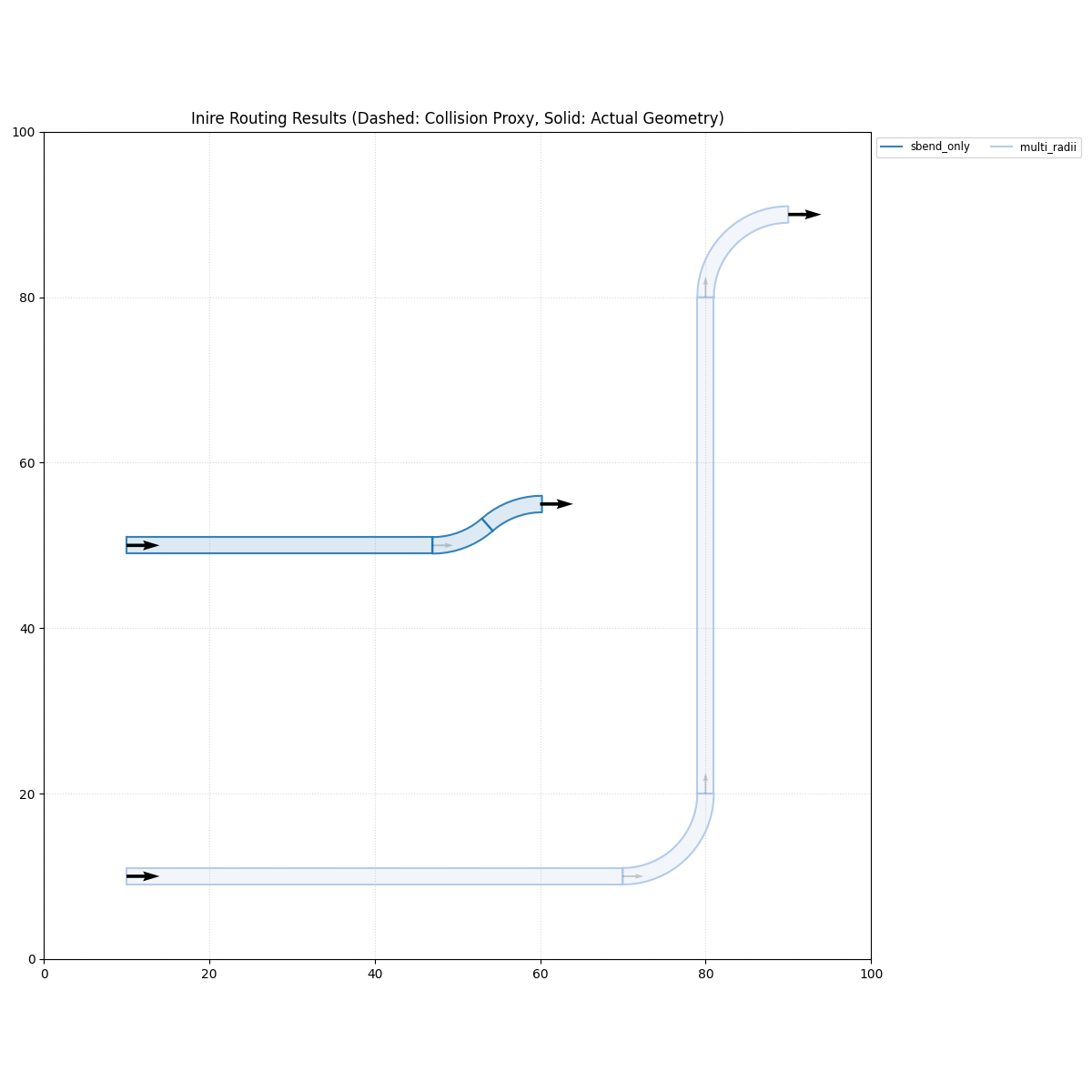
| 04 | 04_sbends_and_radii.py |
04_sbends_and_radii.png |
S-bend and bend-radius behavior on compact routes. |
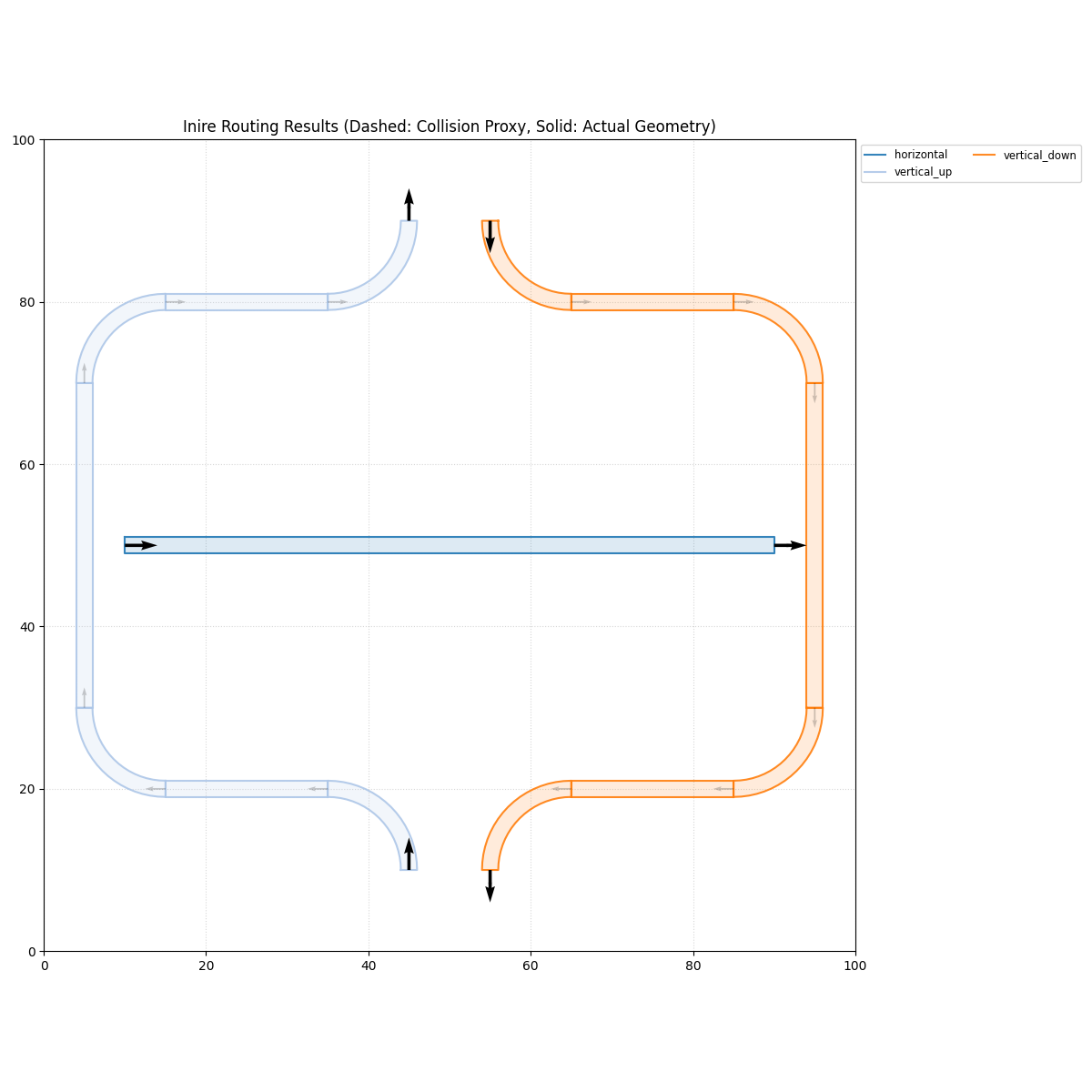
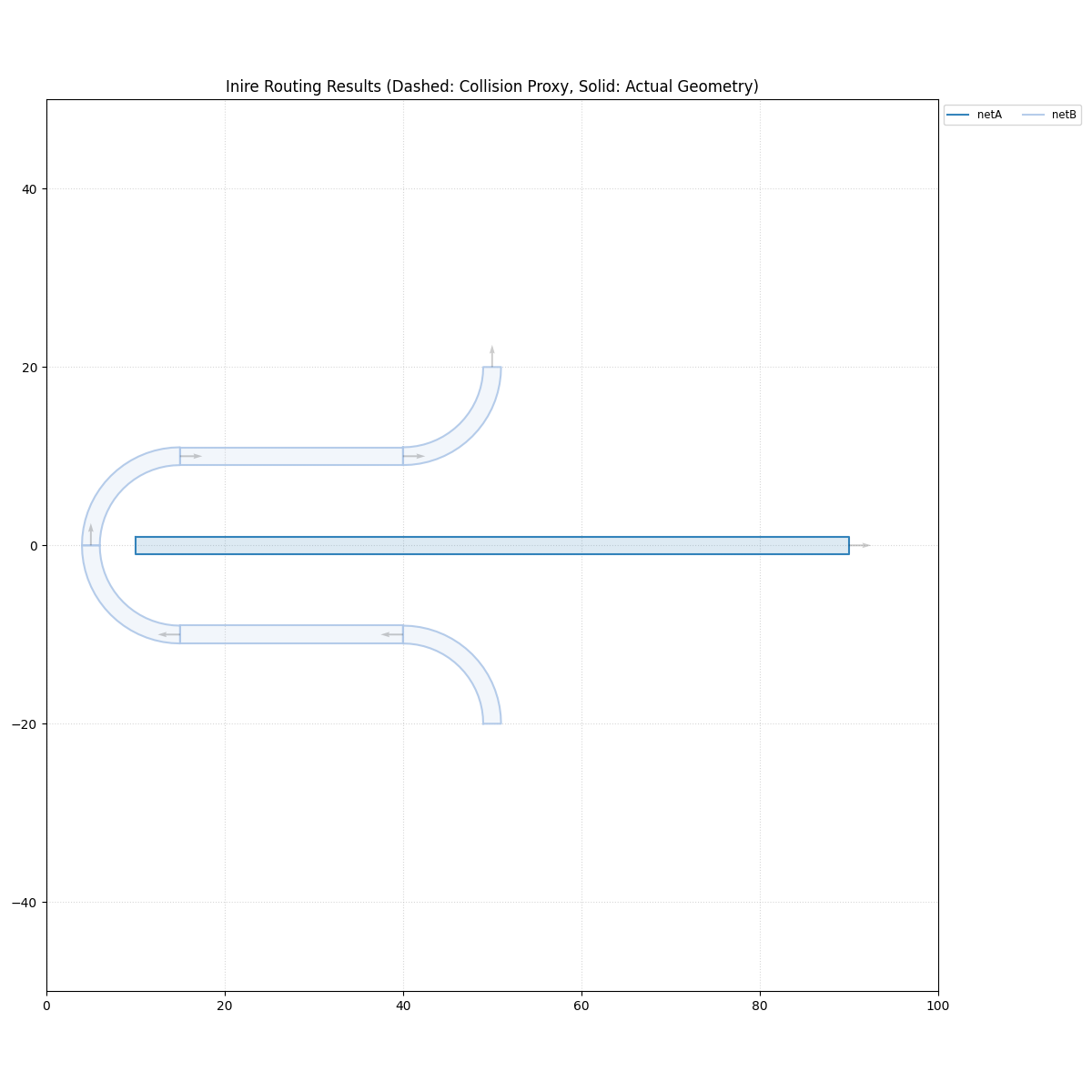
| 05 | 05_orientation_stress.py |
05_orientation_stress.png |
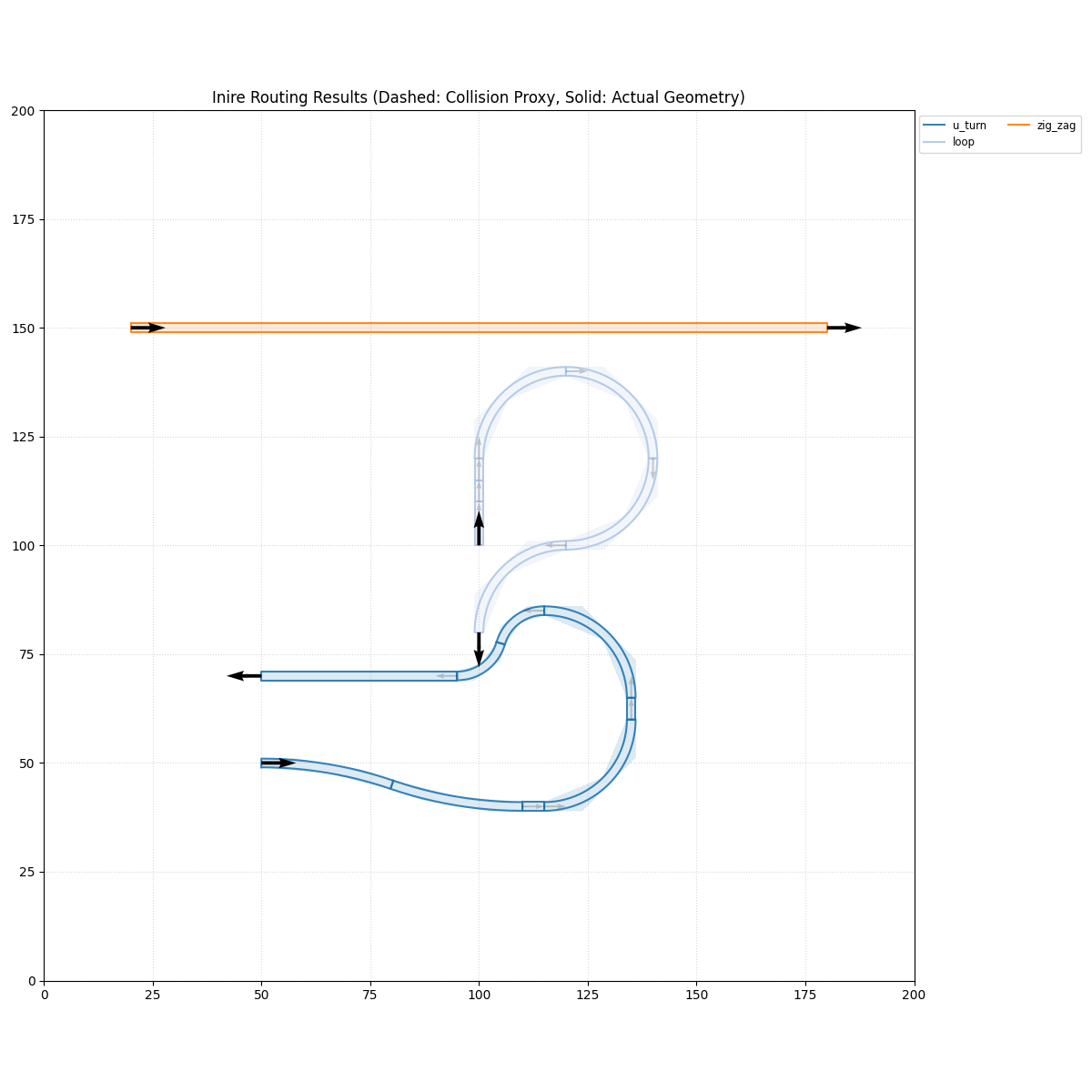
Orientation-heavy routing with flips, loops, and U-turn-like cases. |
| 06 | 06_bend_collision_models.py |
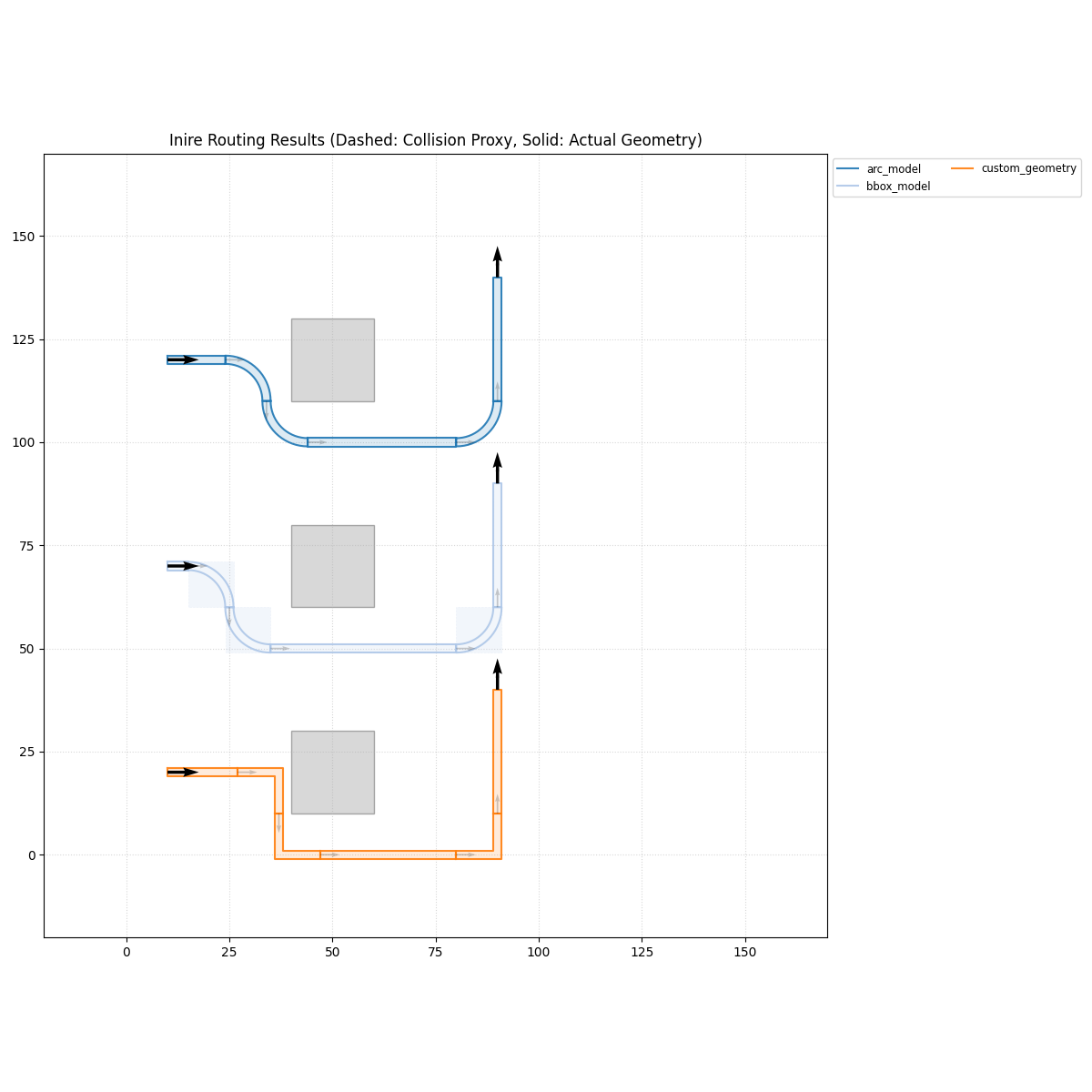
06_bend_collision_models.png |
Comparison of bend collision/proxy geometry models. |
| 07 | 07_large_scale_routing.py |
07_large_scale_routing.png |
Large fan-out through a bottleneck with negotiated congestion and expansion overlay. |
| 08 | 08_custom_bend_geometry.py |
08_custom_bend_geometry.png |
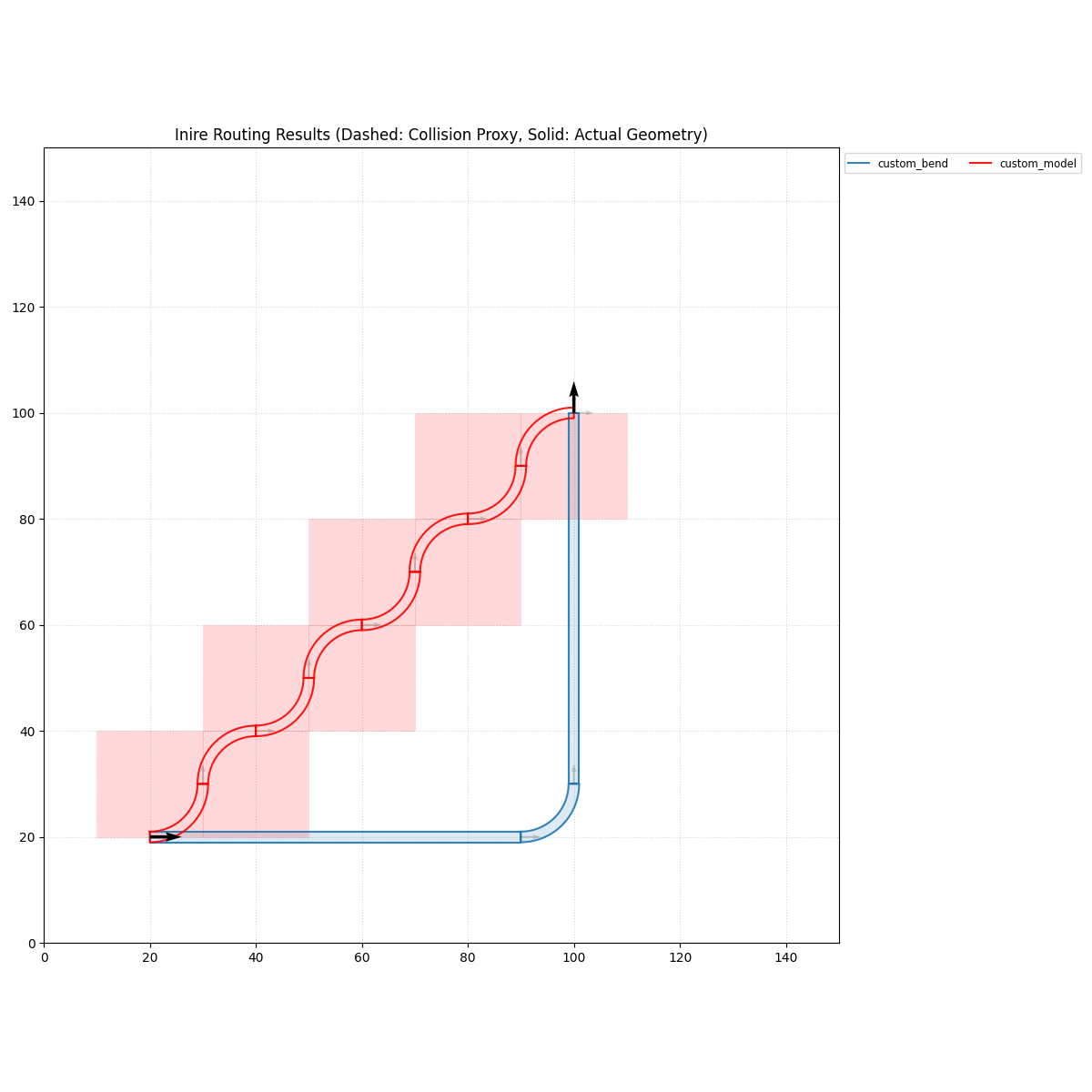
Custom physical bend geometry and separate custom proxy geometry. |
| 09 | 09_unroutable_best_effort.py |
09_unroutable_best_effort.png |
Best-effort partial routing for a blocked or unroutable net. |
01. Simple Route
A minimal single-net example that routes one connection across an empty board and saves the result to 01_simple_route.png.
02. Congestion Resolution
Demonstrates negotiated congestion on a small multi-net problem where overlapping routes must be separated over successive iterations.
03. Locked Paths
Shows how to treat previously routed geometry as fixed static obstacles in a later run.
04. S-Bends And Radii
Highlights compact routing behavior with S-bends and the configured bend radii.
05. Orientation Stress Test
Demonstrates the router's ability to handle complex orientation requirements, including U-turns, 90-degree flips, and loops.
06. Bend Geometry Models
inire supports multiple collision models for bends, allowing a trade-off between search speed and geometric accuracy:
- Arc: High-fidelity geometry (Highest accuracy).
- BBox: Simple axis-aligned bounding box (Fastest search).
- Custom Manhattan Geometry: A custom 90-degree bend polygon with the same width as the normal waveguide.
Example 06 uses the Manhattan polygon as both the true routed bend geometry and the collision proxy.
07. Fan-Out (Negotiated Congestion)
Demonstrates the Negotiated Congestion algorithm handling multiple intersecting nets. The router iteratively increases penalties for overlaps until a collision-free solution is found. This example shows a bundle of nets fanning out through a narrow bottleneck.

08. Custom Bend Geometry
Compares the standard arc against a run that uses a custom physical bend plus a separate custom proxy polygon, with each net routed in its own session.
09. Unroutable Nets & Best-Effort Display
When a net is physically blocked or exceeds the node limit, the router returns the "best-effort" partial path—the path that reached the point closest to the target according to the heuristic. This is critical for debugging design constraints.

Notes
- Example 07 overlays expanded search nodes on the saved routing figure.
- The current implementation can use a cheaper bend proxy on the first negotiated-congestion pass before later passes fall back to the configured bend model. This is controlled by
RoutingOptions.congestion.use_tiered_strategytogether with the bend collision settings described inDOCS.md.